- обзор
- Включенное оборудование
- Использование драйвера
- Силовые соединения
- Моторные соединения
- Размер шага (и микрошаг)
- Управляющие входы
- Ограничение тока
- Рассеяние мощности
- Принципиальная схема
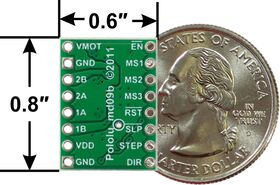
A4983 / A4988 Шасси привода с шаговым двигателем с размерами.
обзор
Этот продукт является платой-носителем или платой для микрошагового драйвера Allegro A4988 DMOS с транслятором и защитой от перегрузки по току; поэтому мы рекомендуем внимательно прочитать Техническое описание A4988 (1MB pdf) перед использованием этого продукта. Этот драйвер шагового двигателя позволяет вам управлять одним биполярный шаговый двигатель при выходном токе до 2 А на катушку (для получения дополнительной информации см. раздел « Вопросы рассеивания мощности » ниже). Вот некоторые из ключевых особенностей драйвера:
- Простой интерфейс управления шагом и направлением
- Пять различных разрешений шага: полный шаг, полшага, четверть шага, восьмой шаг и шестнадцатый шаг
- Регулируемое управление током позволяет вам установить максимальный выходной ток с помощью потенциометра, который позволяет вам использовать напряжения выше номинального напряжения вашего шагового двигателя для достижения более высоких скоростей шага
- Интеллектуальное управление прерыванием, которое автоматически выбирает правильный режим текущего затухания (быстрое затухание или медленное затухание)
- Термическое отключение при перегреве, блокировка по пониженному напряжению и защита от кроссовера
- Защита от короткого замыкания на землю и короткого замыкания
Этот продукт поставляется со всеми компонентами для поверхностного монтажа, включая ИС драйвера A4988, установленными, как показано на рисунке продукта.
Этот продукт поставляется в индивидуальной упаковке с входными контактными штырьками 0,1 ″, но не припаивается; мы также несем версия с мужскими булавками уже впаяна в , Для клиентов, заинтересованных в больших объемах при меньших удельных затратах, мы предлагаем пакетная версия без выводов и пакетная версия с установленными контактами ,
Обратите внимание, что у нас есть несколько драйверов шаговых двигателей, которые можно использовать в качестве альтернативы для этого модуля (и замены во многих приложениях):
- Black Edition A4988 с приводом от шагового двигателя доступен с примерно на 20% лучшей производительностью; кроме тепловых характеристик, Black Edition и эта (зеленая) плата взаимозаменяемы.
- MP6500 перевозчик может выдавать до 1,5 А на фазу (непрерывно) без радиатора и доступна в двух версиях: одна с баком для контроля ограничения тока и одна с цифровым контролем ограничения тока для динамического регулирования предела тока микроконтроллером.
- DRV8825 перевозчик предлагает примерно на 50% лучшую производительность в более широком диапазоне напряжений и имеет несколько дополнительных функций.
- DRV8834 перевозчик работает с напряжением питания двигателя до 2,5 В, что делает его пригодным для применения при низком напряжении.
- DRV8880 перевозчик предлагает динамически масштабируемое ограничение тока и «AutoTune», который автоматически выбирает режим затухания в каждом цикле ШИМ для оптимальной производительности регулирования тока на основе таких факторов, как сопротивление и индуктивность обмотки двигателя, а также динамическая скорость и нагрузка двигателя.
Мы также продаем увеличенная версия носителя A4988 он имеет защиту от обратного напряжения на главном входе питания и встроенные регуляторы напряжения 5 В и 3,3 В, что устраняет необходимость в отдельном питании логики и двигателя.
Некоторые однополярные шаговые двигатели (например, с шестью или восемью выводами) могут управляться этим драйвером как биполярные шаговые двигатели. Для получения дополнительной информации, пожалуйста, смотрите Часто задаваемые вопросы , Однополярные двигатели с пятью выводами не могут использоваться с этим драйвером.
Включенное оборудование
Держатель с шаговым двигателем A4988 поставляется с одним отколовшимся контактом 1 × 16 0,1 "мужской заголовок , Заголовки могут быть припаяны для использования с макеты без припоя или же 0,1 "гнездовые разъемы , Вы также можете припаять провода двигателя и другие соединения непосредственно к плате. (A версия этой платы с уже установленными заголовками также доступно.)
Использование драйвера
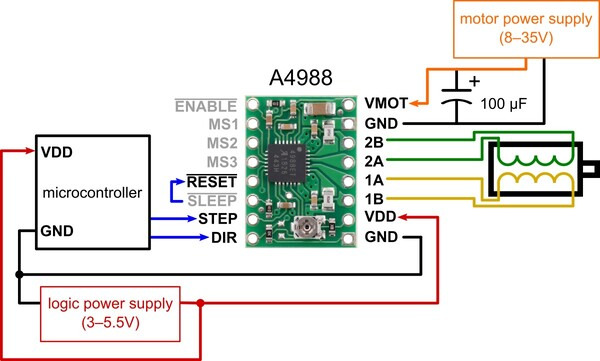
Минимальная схема подключения микроконтроллера к держателю драйвера шагового двигателя A4988 (полноступенчатый режим).
Силовые соединения
Драйвер требует подключения логического напряжения питания (3–5,5 В) к контактам VDD и GND и напряжения питания двигателя (8–35 В) к VMOT и GND. Эти источники питания должны иметь соответствующие развязывающие конденсаторы рядом с платой, и они должны быть способны выдавать ожидаемые токи (пиковые значения до 4 А для питания двигателя).
Предупреждение: эта несущая плата использует керамические конденсаторы с низким ESR, что делает ее подверженной разрушительному воздействию Пики напряжения LC особенно при использовании силовых проводов длиннее нескольких дюймов. При правильных условиях эти пики могут превышать максимальное номинальное напряжение 35 В для A4988 и постоянно повредить плату, даже когда напряжение питания двигателя составляет всего 12 В. Один из способов защитить водителя от таких пиков - это поставить большой (не менее 47 мкФ) электролитический конденсатор по мощности двигателя (VMOT) и заземление где-то рядом с платой.
Моторные соединения
Четырех, шести и восьмипроводные шаговые двигатели могут приводиться в движение A4988, если они правильно подключены; FAQ ответ подробно объясняет правильное подключение.
Предупреждение. Подключение или отключение шагового двигателя при включенном приводе может привести к его повреждению. (В целом, перемонтирование чего-либо, пока оно включено, вызывает проблемы.)
Размер шага (и микрошаг)
Шаговые двигатели обычно имеют размер шага (например, 1,8 ° или 200 шагов на оборот), который применяется к полным шагам. Микрошаговый драйвер, такой как A4988, обеспечивает более высокое разрешение, позволяя определять промежуточные ступени, которые достигаются за счет питания катушек промежуточными уровнями тока. Например, управление двигателем в четвертьшаговом режиме даст двигателю с 200 ступенями на оборот 800 микрошагов за оборот, используя четыре различных уровня тока.
Селекторные входы разрешения (размера шага) (MS1, MS2 и MS3) позволяют выбрать одно из пяти разрешений шага в соответствии с таблицей ниже. MS1 и MS3 имеют внутренние понижающие резисторы на 100 кОм, а MS2 имеет внутренние понижающие резисторы на 50 кОм, поэтому оставление этих трех штырьков выбора микрошагов приводит к отключению, что приводит к полноступенчатому режиму. Для правильного функционирования режимов микропереключения ограничение тока должно быть достаточно низким (см. Ниже), чтобы ограничение тока включалось. В противном случае промежуточные уровни тока не будут правильно поддерживаться, и двигатель пропустит микропереходы.
Управляющие входы
Каждый импульс на вход STEP соответствует одному микрошагу шагового двигателя в направлении, выбранном выводом DIR. Обратите внимание, что контакты STEP и DIR не тянутся к какому-либо конкретному напряжению внутри, поэтому вы не должны оставлять ни один из этих контактов плавающим в вашем приложении. Если вы просто хотите вращение в одном направлении, вы можете привязать DIR напрямую к VCC или GND. Микросхема имеет три разных входа для управления многими состояниями питания: RST, SLP и EN. Подробнее об этих состояниях питания см. Таблицу данных. Обратите внимание, что вывод RST является плавающим; Если вы не используете контакт, вы можете подключить его к соседнему контакту SLP на печатной плате, чтобы поднять его и включить плату.
Ограничение тока
Одним из способов максимизации производительности шагового двигателя является использование максимально высокого напряжения, которое является практичным для вашего применения. В частности, увеличение напряжения, как правило, обеспечивает более высокие скорости шага и шаговый крутящий момент, поскольку ток может изменяться быстрее в катушках после каждого шага. Однако, чтобы безопасно использовать напряжения выше номинального напряжения шагового двигателя, ток катушки должен быть активно ограничен, чтобы он не превышал номинальный ток двигателя.
A4988 поддерживает такое активное ограничение тока, а потенциометр триммера на плате можно использовать для установки ограничения тока. Один из способов установить ограничение тока - это перевести драйвер в двухступенчатый режим и измерить ток, проходящий через одну катушку двигателя, при регулировке потенциометра ограничения тока. Это должно быть сделано, когда двигатель удерживается в фиксированном положении (т.е. без тактирования входа STEP). Обратите внимание, что измеряемый ток составляет всего 70% от фактического значения ограничения тока , так как обе катушки всегда включены и ограничены этим значением в полноступенчатом режиме, поэтому, если вы позже включите режимы микрошагов, ток через катушки будет способен превышать этот измеренный ток полного шага на 40% (1 / 0,7) на определенных ступенях; пожалуйста, примите это во внимание при использовании этого метода для установки текущего ограничения. Кроме того, обратите внимание, что вам необходимо будет выполнить эту настройку еще раз, если вы когда-либо изменить логическое напряжение, Vdd, так как опорное напряжение, которое устанавливает предел тока является функцией Vdd.
Примечание. Ток катушки может сильно отличаться от тока источника питания, поэтому не следует использовать ток, измеренный на источнике питания, для установки предела тока. Подходящее место для установки вашего измерителя тока - последовательно с одной из ваших катушек шагового двигателя.
Другой способ установить ограничение тока, чтобы вычислить опорное напряжение , которое соответствует нужному текущему пределу , а затем настроить ограничения тока потенциометра , пока вы не измерить , что напряжение на выводе VREF. Напряжение на контакте VREF доступно через переход, который обведен кружком на нижнем шелкографическом экране печатной платы. Предел тока, IMAX, относится к опорному напряжению следующим образом:
`` I_ (MAX) = (V_ (REF)) / (8 * R_ (CS)) ``
или переставить, чтобы решить для VREF:
`` V_ (REF) = 8 * I_ (MAX) * R_ (CS) ``
RCS - текущее чувственное сопротивление; В оригинальных версиях этой платы использовались резисторы сопротивления тока 0,050 Ом , но мы перешли на использование резисторов сопротивления тока 0,068 Ом в январе 2017 г., что делает полезной большую часть диапазона регулировочного потенциометра. На следующем рисунке показано, как определить, какие текущие сенсорные резисторы установлены на вашей плате:
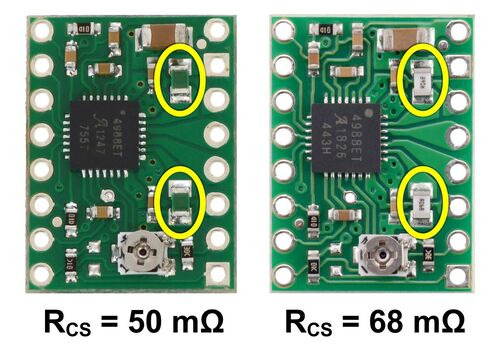
Идентификация оригинальных сенсорных резисторов 50 мОм (слева) и 68 мОм сенсорных резисторов (справа), представленных в январе 2017 года.
Так, например, если вы хотите установить ограничение тока на 1 А и у вас есть плата с резисторами 68 мОм, вы должны установить VREF на 540 мВ. Это гарантирует, что даже если ток через каждую катушку изменяется от шага к шагу, величина вектора тока в шаговом двигателе остается постоянной на уровне 1 А:
`` sqrt (I_ (COIL1) ^ 2 + I_ (COIL2) ^ 2) = I_ (MAX) = 1 текст (A) ``
Если вместо этого вы хотите, чтобы ток в каждой катушке составлял 1 А в полноступенчатом режиме, вам необходимо установить ограничение тока на 40% выше, или 1,4 А, поскольку катушки ограничены примерно 70% от установленного тока. предел в режиме полного шага (уравнение выше показывает, почему это так). Чтобы сделать это с платой с резисторами 68 мОм, вы должны установить VREF на 770 мВ.
Рассеяние мощности
Максимальная сила тока микросхемы драйвера A4988 составляет 2 А на катушку, но фактический ток, который вы можете подавать, зависит от того, насколько хорошо вы можете хранить микросхему в прохладном состоянии. Печатная плата носителя предназначена для отвода тепла от ИС, но для подачи более чем приблизительно 1 А на катушку требуется радиатор или другой метод охлаждения.
Этот продукт может нагреться достаточно, чтобы обжечь вас задолго до того, как чип перегреется. Будьте осторожны при обращении с этим продуктом и другими компонентами, подключенными к нему.
Обратите внимание, что измерение потребляемого тока на источнике питания обычно не дает точного измерения тока катушки. Поскольку входное напряжение для драйвера может быть значительно выше, чем напряжение катушки, измеренный ток на источнике питания может быть немного ниже, чем ток катушки (драйвер и катушка в основном действуют как переключающий понижающий источник питания). Кроме того, если напряжение питания очень высокое по сравнению с тем, что необходимо двигателю для достижения заданного тока, рабочий цикл будет очень низким, что также приводит к значительным различиям между средним и среднеквадратичным током.
Принципиальная схема
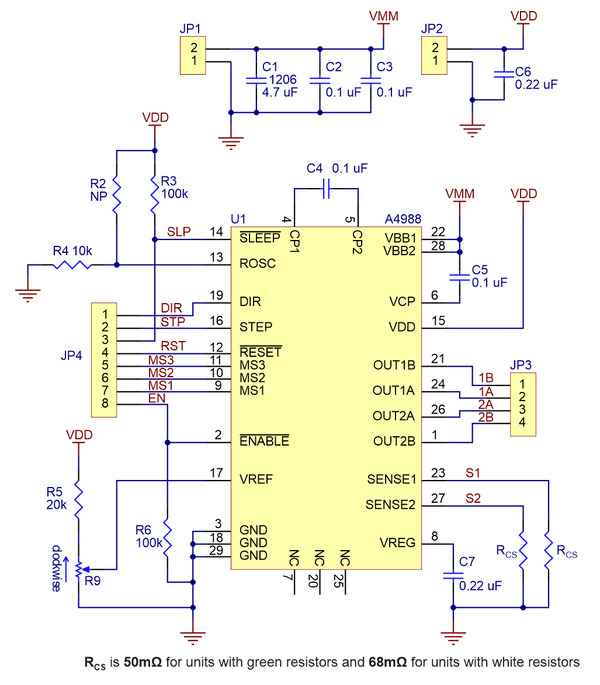
Принципиальная схема держателя привода шагового двигателя A4988 (как зеленого, так и черного цветов).
Примечание: эта доска является заменой для нашего оригинала (и теперь снята с производства) A4983 держатель водителя шагового двигателя , Более новый A4988 предлагает защиту от перегрузки по току и имеет внутреннюю опускную способность 100 кОм на выводе выбора микрошагов MS1, но в остальном он практически идентичен A4983.
Похожие
Вестерн Пресс (ПК) ОбзорБольшая часть меня скучает по суровому миру Дикий Запад ; мир, в котором справедливость восторжествует, Обзор TP-Link Neffos X1
Большинство людей, которым я сказал, что я должен протестировать устройство с логотипом TP-Link на корпусе, были убеждены, что речь идет о роутере, а не о телефоне. Правда в том, что вряд ли кто-то ассоциирует эту компанию со смартфонами. На мой взгляд, неправильно! В последние дни в моих руках в качестве основного телефона принимал Neffos X1 или хороший бюджетный смартфон, который только выходит Anthem STR усилитель мощности - Polpak Польша - дистрибьютор аудио и домашних кинотеатров брендов
... ие + ARC® ) Усилитель Anthem STR является сердцем двухканальной системы мирового класса"> ПРОВЕРЬТЕ ПОСЛЕДНИЕ ОБНОВЛЕНИЯ (программное обеспечение + ARC® ) Усилитель Anthem STR является сердцем двухканальной системы мирового класса. Он обеспечивает мощную мощность от аудиофильных качественных выходов в впечатляюще разработанном устройстве. Обеспечение 400 Вт при 8 Ом для обоих каналов MS 180 пильный станок
Легкая бензиновая цепная пила с проверенными техническими решениями STIHL. Идеально подходит для заготовки дров и строительных работ из дерева. Оснащен натяжителем боковой цепи и экономичным двигателем 2-MIX. Направляющая 35 см позволяет обрезать еще более толстые ветви. модели цена * Брутто рекомендуемая розничная цена. Мы оставляем за собой право вносить технические изменения, спецификации, стандартное и дополнительное оборудование и изменения цен. Ford Fiesta Активный обзор
Это первая из немногих моделей на полпути к кроссоверу (которые, вероятно, на полпути к полпути к внедорожникам), которые представляет Ford. Вы будете быть в состоянии получить Активную модель нового Фокуса и Ка + тоже , Ford считает, что до 15% покупателей Fiesta выберут Active. Я всегда думал Какой скутер купить?
Если вы планируете купить скутер, вам нужно подумать о том, что вам действительно нужно. Это должен быть подарок для ребенка? Или, может быть, вы будете использовать оборудование самостоятельно - ездить на работу, гулять по парковым аллеям, гоняться с друзьями или делать трюки на платформе? Рынок отвечает каждой из ваших потребностей. Решение будет непростым, но после прочтения нашей статьи оно перестанет быть проблемой. Когда RTV, когда бытовая техника? Покупаем электронное оборудование в интернете
Компьютеры осенью (потому что дети ходят в школу), стиральные машины и посудомоечные машины весной (потому что ремонт начинается)? Мы Обзор FX-Audio DAC-X7
... ит из строя, и оказывается, что независимо от ценовой полки он может обслуживать - и фактически обслуживает - своего покупателя большой функциональный диапазон за очень разумные деньги. В то же время он нацелен на оборудование, которое я лично ищу, и, таким образом, является своего рода альтернативой платам SC808 / STX, которые больше не производятся, но со стороны внешнего устройства, которое предлагало бы функциональность, не уступающую им за аналогичные деньги. И у меня сложилось впечатление, Как выбрать оригинальный и практичный подарок для ребенка?
Прежде чем отправиться на рождественские покупки, подумайте, что вы хотите купить, чтобы утешить. Если вы начнете думать о выборе игрушки только в магазине, вас легко соблазнит. Не забудьте: Не дайте себя одурачить - магазины находят тысячи причин, Обзор: Moto Z Играйте с Hasselblad True Zoom Moto Mod
Обзоры смартфонов, в том числе и я, пишут отзывы, которые читают больше как Отзывы Роберта Паркера о дорогих винах с великих виноградников. Рецензенты-энофилы и смартфоны часто блуждают по тонким различиям, которые большинство потребителей не имеют палитры, чтобы различать. Moto Z с Hasselblad True Zoom Мото Мод Однако Бещады - почему здесь лучше всего смотрят звезды?
Подготовка к ночным наблюдениям на холме в Стеннице. Рис. Сумасшедшая наука Вид на Млечный путь в Бещадах всегда шокирует нас, когда мы только приезжаем сюда из города. Вы можете увидеть до 7000 звезд! Мы советуем вам с каким оборудованием начать наблюдения, чтобы в полной мере использовать потенциал таких
Комментарии
Какое оборудование для наблюдения выбрать?Какое оборудование для наблюдения выбрать? Adaś использует телескоп для наблюдения за Солнцем (мы никогда не смотрим на него через обычный телескоп!). Рис. Сумасшедшая наука Вид с этого холма днем захватывает дух, а ночью это просто сказка! И это только начало, потому что гораздо больше Или, может быть, вы будете использовать оборудование самостоятельно - ездить на работу, гулять по парковым аллеям, гоняться с друзьями или делать трюки на платформе?
Или, может быть, вы будете использовать оборудование самостоятельно - ездить на работу, гулять по парковым аллеям, гоняться с друзьями или делать трюки на платформе? Рынок отвечает каждой из ваших потребностей. Решение будет непростым, но после прочтения нашей статьи оно перестанет быть проблемой. Самокат издавна ассоциируется не только с игрушками для детей, а возраст или вес тела являются лишь двумя из множества критериев, на которые следует обращать Какой размер велосипеда выбрать?
Какой размер велосипеда выбрать? На эти и другие вопросы отвечает наш мегападник о покупке велосипедов. Сколько денег потратить на байк? Велосипед - это не произведение искусства, это инструмент, предназначенный для достижения определенной цели - поездок на работу, гонки или отдыха. Мы должны потратить ровно столько денег, сколько нам нужно на велосипед, подходящий для наших приложений. Переплачивать нечего - более дорогой велосипед не сделает нас лучшими
Это должен быть подарок для ребенка?
Или, может быть, вы будете использовать оборудование самостоятельно - ездить на работу, гулять по парковым аллеям, гоняться с друзьями или делать трюки на платформе?
Когда RTV, когда бытовая техника?
Какое оборудование для наблюдения выбрать?
Или, может быть, вы будете использовать оборудование самостоятельно - ездить на работу, гулять по парковым аллеям, гоняться с друзьями или делать трюки на платформе?
Какой размер велосипеда выбрать?
Сколько денег потратить на байк?

